Intersection form
|
This page has not been refereed. The information given here might be incomplete or provisional. |
Contents |
[edit] 1 Introduction
Let  be a closed oriented
be a closed oriented  -manifold (PL or smooth). After Poincaré one studies the intersection number of transverse submanifolds or chains in .
The intersection number gives a bilinear intersection product
-manifold (PL or smooth). After Poincaré one studies the intersection number of transverse submanifolds or chains in .
The intersection number gives a bilinear intersection product

defined on the homology of .
For  this is the intersection form of denoted by
this is the intersection form of denoted by  .
For
.
For  the signature of this form is the signature
the signature of this form is the signature  of .
The intersection product is closely related to the notions of characteristic classes and linking form.
These are important invariants used in the classification of manifolds.
of .
The intersection product is closely related to the notions of characteristic classes and linking form.
These are important invariants used in the classification of manifolds.
In this page  is a triangulation (or a cell subdivision) of , and
is a triangulation (or a cell subdivision) of , and  is the dual cell subdivision.
is the dual cell subdivision.
The exposition follows [Kirby1989, Chapter II], [Skopenkov2015b,  6, 10].
6, 10].
[edit] 2 Definition of the intersection product
In this subsection we mostly omit  -coefficients.
-coefficients.
A short direct definition of a homology group with -coefficients.
For an integer  denote by
denote by  the set (the -space) of arrangements of zeroes and units on the -dimensional cells of
(so
the set (the -space) of arrangements of zeroes and units on the -dimensional cells of
(so  if there are no -dimensional cells in ).
Denote by
if there are no -dimensional cells in ).
Denote by  the extension over
the extension over  of the map taking an -dimensional cell
of the map taking an -dimensional cell  of to the boundary of .
Denote
of to the boundary of .
Denote

Then the -th homology group of with -coefficients is defined as  .
This depends only on , not on .
.
This depends only on , not on .
A short direct definition of the modulo 2 intersection product.
For modulo 2 chains  and
and  define the modulo 2 intersection number by the formula
define the modulo 2 intersection number by the formula

Represent classes ![[x]\in H_k(N;\Zz_2)](/images/math/7/0/7/707dad1546f3e2d2b347d942a382cab6.png) and
and ![[y]\in H_{n-k}(N;\Zz_2)](/images/math/4/6/7/4679c012b7ce2e40274b6c40ad1762d2.png) by cycles
by cycles  and
and  viewed as unions of
viewed as unions of  -simplices of and
-simplices of and  -simplices of , respectively.
Define the modulo 2 intersection product
-simplices of , respectively.
Define the modulo 2 intersection product
![\displaystyle I_{N,2}=\cap_{N,2}: H_k(N;\Zz_2) \times H_{n-k}(N;\Zz_2) \to \Zz_2\quad\text{by}\quad I_{N,2}([x],[y]):=I_{N,2}(x,y).](/images/math/3/a/9/3a9d69a54208e265e76fa92de305c3ef.png)
This product is well-defined because the intersection of a cycle and a boundary consists of an even number of points (by definition of a cycle and a boundary).
Sketch of a short direct definition of the intersection product. Analogously, counting intersections with signs, one defines the intersection number

of integer chains  and
and  .
Clearly, the product of a cycle and a boundary is zero.
Hence this defines the above intersection product
.
Clearly, the product of a cycle and a boundary is zero.
Hence this defines the above intersection product
 .
.
Remark 2.1. (a) Using the notion of transversality, one can give an equivalent (and `more general') definition as follows. Take a -chain  and an -chain
and an -chain  which are transverse to each other. The signed count of the intersections between and gives the intersection number
which are transverse to each other. The signed count of the intersections between and gives the intersection number  . A particular case is intersection number of immersions.
Then define the intersection product
. A particular case is intersection number of immersions.
Then define the intersection product  by
by ![I_N([x],[y]):=I_N(x,y)](/images/math/2/7/d/27d0a1c2e4c3335add9a5d5191f022ab.png) .
.
(b) Using the notion of cup product, one can give a dual (and so an equivalent) definition:
![\displaystyle I_N(x,y) = \langle x^*\smile y^*,[N]\rangle \in \Z,](/images/math/b/0/9/b098fae44db83b9fa8ee187a581e1526.png)
where  ,
,  are the Poincaré duals of , , and
are the Poincaré duals of , , and ![[N]](/images/math/3/5/8/3581986b0e7b591acd8d60e6ee096f5d.png) is the fundamental class of the manifold . We can also define the cup (cohomology intersection) product
is the fundamental class of the manifold . We can also define the cup (cohomology intersection) product
![\displaystyle I_N^*: H^k(N;\Zz) \times H^{n-k}(N;\Zz) \to \Zz \quad\text{by}\quad I_N^*(p,q) = \langle p \smile q , [N] \rangle .](/images/math/d/d/3/dd301a192d5a20a4267f2bf7881bcfb7.png)
The definition of a cup product is `dual' (and so is analogous) to the above definition of the intersection product on homology, but is more abstract. However, the definition of a cup product generalizes to complexes (and so to topological manifolds). This is an advantage for mathematicians who are interested in complexes and topological manifolds (not only in PL and smooth manifolds). See [Skopenkov2005, Remark 2.3].
[edit] 3 Simple properties
The following properties are easy to check using the simple direct definition; they also follow from simple properties of the cup product.
The intersection product is bilinear. Hence it vanishes on torsion elements. Thus it descends to a bilinear (integer) intersection pairing

on the free modules.
We have

Hence for
- If is even the form is symmetric:
 .
.
- If is odd the form is skew-symmetric:
 .
.
[edit] 4 Poincaré duality
Theorem 4.1.[Poincaré duality] (a) The modulo 2 intersection product is non-degenerate.
(b) The integer intersection pairing is unimodular (in particular non-degenerate).
Proof of (a). (This proof is well-known to specialists but is, in this short and explicit form, absent from textbooks.)
We use orthogonal complements with respect to the modulo 2 intersection product
 .
It suffices to prove that
.
It suffices to prove that

Let us prove the left-hand equality; the right-hand equality is proved analogously.
Since  is non-degenerate, we only need to check that
is non-degenerate, we only need to check that  .
The inclusion
.
The inclusion  is obvious.
The opposite inclusion follows because if
is obvious.
The opposite inclusion follows because if  for an
for an  -cell
-cell  of and a chain
of and a chain  , then
, then  does not involve the cell
does not involve the cell  dual to .
dual to .
[edit] 5 Definition of signature
Let  be a symmetric bilinear form on a free
be a symmetric bilinear form on a free  -module.
Denote by
-module.
Denote by  (
( ) the number of positive (negative) eigenvalues.
) the number of positive (negative) eigenvalues.
Note that since is symmetric, it is diagonalisable over the real numbers, so () is the dimension of a maximal subspace on which the form is positive (negative) definite.
Then the signature of is defined to be
Tex syntax error
is divisible by 4, the signature Tex syntax erroris defined to be the signature of the intersection form of
.
[edit] 6 On classification of bilinear forms
Let and  be bilinear forms on free -modules (or -vector spaces)
be bilinear forms on free -modules (or -vector spaces)  and
and  respectively. The forms and are called equivalent or isomorphic if there is an isomorphism
respectively. The forms and are called equivalent or isomorphic if there is an isomorphism  such that
such that  .
.
The rank of is the rank of the underlying -module (or -vector space) .
A form is even if  is an even number for any element . Equivalently, if is written as a square matrix in a basis, it is even if the elements on the diagonal are all even. Otherwise, is odd.
is an even number for any element . Equivalently, if is written as a square matrix in a basis, it is even if the elements on the diagonal are all even. Otherwise, is odd.
[edit] 6.1 Classification over integers modulo 2
Theorem 6.1.
(a) Every odd symmetric non-degenerate bilinear form over is isomorphic to the sum of some number of `unity' forms  .
.
(b) Every even symmetric non-degenerate bilinear form over is isomorphic to the sum of some number of `hyperbolic' forms  of rank
of rank  defined by the following matrix
defined by the following matrix

In particular the rank of is even.
Clearly, different sums from the theorem are not isomorphic.
[edit] 6.2 Classification of skew-symmetric forms
Theorem 6.2.
Every skew-symmetric unimodular bilinear form over  is isomorphic to the sum of some number of hyperbolic forms
is isomorphic to the sum of some number of hyperbolic forms  of rank defined by the following matrix
of rank defined by the following matrix

In particular the rank of is even.
Proof. The proof is by induction on the rank of the module  on which is defined.
Let
on which is defined.
Let  be the matrix of in some basis.
Then
be the matrix of in some basis.
Then  . Thus expanding the determinant by the first column we obtain
. Thus expanding the determinant by the first column we obtain  .
Hence
.
Hence  (observe that
(observe that  ).
Denote by
).
Denote by  elements of such that
elements of such that

 for
for  . Let
. Let  be a
be a  matrix. Then
matrix. Then  . For any matrix
. For any matrix  the first row of the matrix
the first row of the matrix  is equal to the first row of the matrix . Therefore
is equal to the first row of the matrix . Therefore  and
and  represents the matrix of in a different basis
represents the matrix of in a different basis  . Since
. Since  , the restriction of onto the submodule
, the restriction of onto the submodule  has matrix . Since is non-degenerate and unimodular, is a direct summand in , i.e.,
has matrix . Since is non-degenerate and unimodular, is a direct summand in , i.e.,  . Now we restrict to
. Now we restrict to  and apply the inductive hypothesis to the restriction.
and apply the inductive hypothesis to the restriction.
Clearly, different sums from the theorem are not isomorphic.
[edit] 6.3 Examples of symmetric indefinite forms
A form is called definite if it is positive or negative definite, otherwise it is called indefinite. Here we show that
(O) for any pair  there is an odd unimodular symmetric indefinite form of rank
there is an odd unimodular symmetric indefinite form of rank  and signature ;
and signature ;
(E) for any pair  there is an even unimodular symmetric indefinite form of rank and signature
there is an even unimodular symmetric indefinite form of rank and signature
 .
.
Cf. Theorem 6.3 and Proposition 6.4.
All values (O) are realised by direct sums of the forms of rank 1,

An even positive definite form of rank 8 is given by the  matrix
matrix
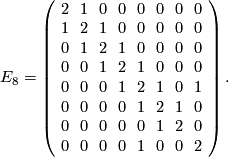
Likewise, the matrix  represents a negative definite even form of rank 8.
represents a negative definite even form of rank 8.
On the other hand, the matrix  given by
given by

determines an indefinite even form of rank 2 and signature 0. It is easy to see that the direct sums

with  ,
,  realise all forms from (E).
Here we use the convention that
realise all forms from (E).
Here we use the convention that  is the -fold direct sum of for
is the -fold direct sum of for  and
and  is the
is the  -fold direct sum of for
-fold direct sum of for  .
.
[edit] 6.4 Classification of symmetric indefinite forms
The classification of unimodular definite symmetric bilinear forms is a deep and difficult problem. However the situation becomes much easier when the form is indefinite. Fundamental invariants are rank, signature and being odd or even (aka type). There is a simple classification result of indefinite forms [Serre1970],[Milnor&Husemoller1973]:
Theorem 6.3. (a) Every odd indefinite unimodular symmetric bilinear form over is isomorphic to the sum of some number of `unity' forms and some number of `minis unity' forms  .
.
(b) Two indefinite unimodular symmetric bilinear forms over are equivalent if and only if they have the same rank, signature and type.
Part (a) follows by part (b).
There is a restriction for values of the above invariants.
Proposition 6.4. The signature of an even (definite or indefinite) form is divisible by 8.
This follows from Proposition 6.5 below.
An element  is called a characteristic vector of the form if
is called a characteristic vector of the form if

for all elements  . Characteristic vectors always exist. In fact, when reduced modulo 2, the map
. Characteristic vectors always exist. In fact, when reduced modulo 2, the map  is linear.
Hence by unimodularity there exists an element such that the map
is linear.
Hence by unimodularity there exists an element such that the map  equals this linear map.
equals this linear map.
The form is even if and only if  is a characteristic vector.
If and
is a characteristic vector.
If and  are characteristic vectors for , then by unimodularity there is an element
are characteristic vectors for , then by unimodularity there is an element  with
with
 .
Hence the number
.
Hence the number  is independent of the chosen characteristic vector modulo 8.
One can be more specific:
is independent of the chosen characteristic vector modulo 8.
One can be more specific:
Proposition 6.5.
For a characteristic vector of the unimodular symmetric bilinear form one has

Proof.
Suppose is a characteristic vector of . Then  is a characteristic vector of the form
is a characteristic vector of the form
 , where
, where  form basis elements of the additional
form basis elements of the additional  summand with? square
summand with? square  . We notice that
. We notice that

However, the form is indefinite, so the above classification theorem applies. In particular, is odd and has the same signature as , so it? is equivalent to the diagonal form with  summands of (+1) and
summands of (+1) and  summands of . This diagonal form has a characteristic vector that is simply a sum of basis elements in which the form is diagonal. Of course
summands of . This diagonal form has a characteristic vector that is simply a sum of basis elements in which the form is diagonal. Of course  . The claim now follows from the fact that the square of a characteristic vector is independent of the chosen characteristic vector modulo 8.
. The claim now follows from the fact that the square of a characteristic vector is independent of the chosen characteristic vector modulo 8.
[edit] 7 References
- [Kirby1989] R.C. Kirby, The topology of 4-manifolds, Lecture Notes in Math. 1374, Springer-Verlag, 1989. MR1001966 (90j:57012)
- [Milnor&Husemoller1973] J. Milnor and D. Husemoller, Symmetric bilinear forms, Springer-Verlag, New York, 1973. MR0506372 (58 #22129) Zbl 0292.10016
- [Serre1970] J. Serre, Cours d'arithmétique, Presses Universitaires de France, Paris, 1970. MR0255476 (41 #138) Zbl 0432.10001
- [Skopenkov2005] A. Skopenkov, A classification of smooth embeddings of 4-manifolds in 7-space, Topol. Appl., 157 (2010) 2094-2110. Available at the arXiv:0512594.
- [Skopenkov2015b] A. Skopenkov, Algebraic Topology From Geometric Viewpoint (in Russian), MCCME, Moscow, 2015, 2020. Accepted for English translation by `Moscow Lecture Notes' series of Springer. Preprint of a part
[edit] 8 External links
- The Wikipedia page on Poincaré duality